Viime vuosina on tullut hacklab-aiheisia projekteja useampi vastaan ehdotetuksena yhdistyksen ( Tivia Satakunta ry ) tai suoraan kontaktoidun jäsenen kautta. Muutamaa ollaan myös edistetty hacklabin kokoontumispaikassa Väinölän Radiotalollakin. Tässä luettelon omaisesti muutama mitä tuli tänään 18.3.2025 mieleen.
Konkreettisia ideasta kokeiluksi asti päätyneitä:
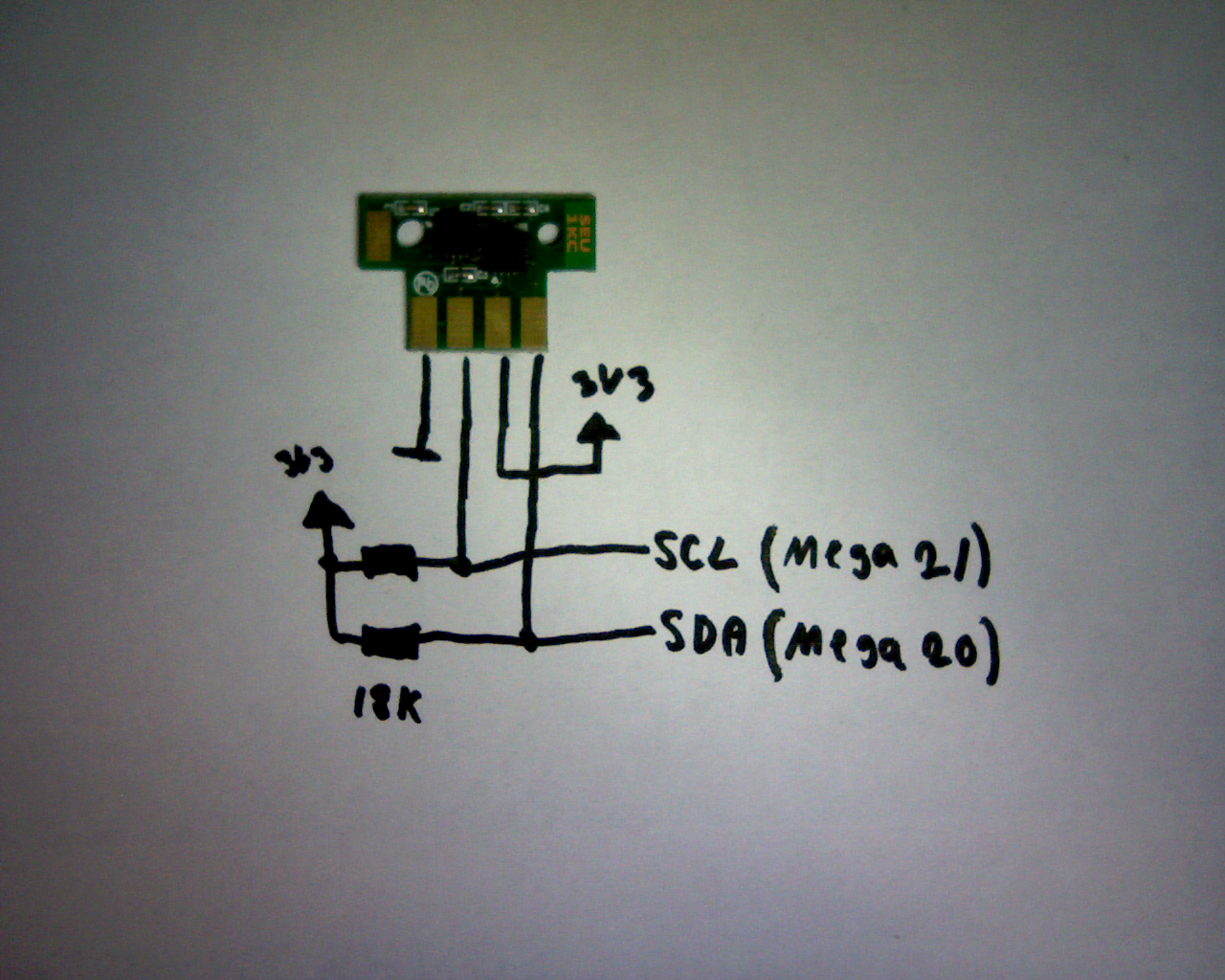
- LoraWAN-kokeilu. Kävijälaskuri, Kullaan Joutsijärvellä Porin kaupungin luvalla, jatkunut useamman vuoden. Suuntaa antavaa vahvistavaa tietoa on saatu kaupungin luontopajalle kävijämääristä. 2024 syksystä alkaen laskuri ollut pois käytöstä ilkivallan vuoksi. 2025 siirretään laskuri uuteen helpommin huollettavaan kohtaan. Tätä ollaan perinteisesti käyty kerran vuodessa elokuussa katsastamassa grillailu-kävelyretken merkeissä ( satkynet.fi sivuilla ). Radiotalon tuntumassa ei toistaiseksi ole tehty halppis-gatewayn asentamisen jälkeen muita varsinaisia iot-kokeiluja.
- AWS-kokeilut, mm. Serverless:n hyödyntäminen osana LoraWAN-kokeilua korvaamaan pipedream palvelun käyttöä. Tähän on myös hyödynnetty AWS non-profit credittejä, joita edelleen tarkoitus hyödyntää.
- Enska-robotti. Piensarjaan kuuluva proto robotti tehtiin onnistuneesti. Sen käyttö odottaa vielä robosota-areenan valmistumista.
- Tehdas ryn vaihtoehtohistoria-installaatio 2022. suopuhe ja chatgpt tilateos (huoneen vastakkaisissa nurkissa tahdistettu, originaali ja muutettu Tehdas ryn historiikki digitaalisesti puhuttuna. Koodit löytyy githubista. Tämä on selkeästi päättynyt kokeilu/teos.
Ideoita, jotka ei ihan lentäneet vielä (lue: osa selkeästi kesken)
- Lorawan-kokeilu. Halkolaskuri. Kullaalla siltainsuolla tämä. Paikka ei ideaali ja mittaustuloksissa jotain kummaa vielä.
- Lorawan-kokeilu. Kävijälaskurin asennus. Kylässaren kyläyhdistyksen kanssa yhteistyössä.
- Ledi-matriisit + hätäseis-painikkeet ulos. Interaktiivinen ”pimeän ajan” valaistus-teos Radiotalolle ja sen pihapiiriin
- Robosota-areena. 2024 loppukeväästä alkaen areena ollut tauolla. Materiaalit esim. suojakupua varten on. Pöytälevy laitoineen ja jalkoineen on. Eli instrumentointi-vaihe puuttuu vielä.
- AWS-tekoälykokeilut, kustannussyistä näitä ei enää jatkettu 2024 jälkeen kun Non-profit Credittien ehdot muuttuivat tiukemmiksi AWS Bedrock palvelun osalta.
- Teslacoil-demo Radiotalolla. Tämä on hyvin alkupisteessä ajatuksena lähinnä että voisi hyödyntää alakerran kohtalaisen kokoisia vanhoja eristettyjä käämejä.
- Puhuva pää. idea (2023) Tehdas ryn jäseneltä,Pää joka matkii sinua ja juttelee. 2025 tämä voisi olla jo melkolailla helpompaa.
- Ovikello radiotalolle. How hard that can be…
Tässä siis muutama idea joita voi halutessaan tulla vaikka hacklabille edistämään jos kiinnostusta.
Ideat jotka ratkesivat toisella tapaa:
- Kävijälaskuri Promenadisaliin. 2024. Ongelman ja tarpeen selvittyä vinkattu hankkimaan class ohlsonin ns. valmis hylly-ratkaisu alle 100€ ilman atk:ta.
- Kävijälaskuri-keskusteluja. 2022-2023. esim. laajemmasta käytöstä Porin kaupungin luontoreiteille tai kohteisiin mm. Tampereen teknillisen yliopistonkin kanssa. Tässä kerrottu viestiä että yhdistys ei ole voinut ottaa yleishyödyllisyyteen vedoten kaupallista vastuuta, vaan kokeilut on tehty kohteeseen protoratkaisuina, ja käytännössä ilman takuuta tai korvausta, toki silti huomioiden mm. tietosuojaa ja tietoturvaa kunnioittavia periaatteita. Metsähallituksen henkilöön yritettiin olla yhteydessä, lähinnä jos kokemuksia ratkaisuista olisi haluttu vaihtaa. Yliopistokeskuksella oli kävijälaskureita sivuava hanke, jossa myös vaihdettiin kokemustietoa ja tehtiin pieni jo päättynyt kokeilukin. Yleisesti voidaan todeta että kunnat ja ehkä metsähallituskin saanee kävijälaskijatiedoksi tarvittaessa myös operaattoridataa. Tämä on tämänhetkine oletuksemme että pääsääntöisesti tällä tavalla kävijämääriä esim. jollakin alueella arvioidaan julkisten toimijoiden taholta.
- Jalkapallopelitutka, harrastekäyttöön. 2024. Ajatus jäseneltä. Konenäköä ja siihen soveltuvaa tekoälymallia hyödyntävä avoimen lähdekoodin työkaluihin nojaava ratkaisu. Tässä päädyttiin vielä harkitsemaan kaupallista vaihtoehtoa tai nykyistä ”manuaalista” tapaa.
- Kuormanosturin vaakanäytön korjaaminen. 2023. Tämä oli mielenkiintoinen ongelma, mutta tässäkin oli kaupallinen ja aikatauluun sidottu tulokulma eli sikäli tässä ei pystytty apua tarjoamaan.