Kaikki alkoi siitä kun sain läjän lautoja, lähinnä kakkosnelosia siskon autotalliremontin jäljiltä. Ajattelin tehdä niistä ”wooden dummy”n Wing chun kung fua varten. Eli iso puupökkelö jossa on kolme kättä ja jalka.
Tässä piirustukset jotka piirsin puhtaaksi vanhasta kuluneesta monistenipusta: wooden_dummy_v1.1
Eli tein kahdeksasta kakkosnelosesta neliön 1,5m pölkyn, ensin höyläämällä ja sitten liimaamalla ne yhteen, jonka jälkeen höyläsin sen pyöreämmäksi sorvia varten.
Höytälly melkein pyöreäksi sorvia varten.
Aloin tekemään sorvia. En tehnyt säädettävää pituutta, vaan varta vasten tuota puupökkelöä varten pituuden. Senkin tein kakkosnelosista. Kumpaankin päähän tuli 20mm reiällä olevat laakerit kahteen kertaan, jotka tukivat M20 kierretankoa.
Sorvikehikko
Kierretankojen toiseen päähän hioin kuppiterän, ja toiseen päähän luotilangan painon. Myöhemmin totesin että parempi vaan hioa kierretangon pää teräväksi. Kuppiteränkin tulen korvaamaan jollain hitsatulla kappaleella.
Työstettävä kappale kiinnitetään sorviin asettamalla kappale ja hakkaamalla toista päätä vasaralla samalla kiristäen mutteria akselin ja laakerin välistä.
Kokeilin huvikseni pyörittäisikö rullalaudan moottori tukkia, niin helposti pyöritti. En halunnut kuitenkaan tehdä sitä niin, koska virransaanti muodostuisi ongelmaksi; joko tyhjenevät akut tai kallis virtalähde.
Rullalaudan moottori
Hain romuttamolta 1,1kW 3-vaihemoottorin ja kytkin sen 70uF kondensaattorin kanssa yhteen vaiheeseen. Sitä ei kannattanut pyörittää kymmentä sekuntia kauempaa, koska moottori ylikuumeni nopeasti.
Sain kaverilta taajuusmuuttajan, jonka hän vielä sääti valmiiksi. Kierrosnopeutta eli taajuutta saa säädettyä potikasta, ja tukki pyörii iloisesti.
Taajuusmuuttaja. 1 vaihe sisään, 3 ulos.Siinä nykymuodossaan
Sain tukin sorvattua. Ensi alkuun käytin vanhaa suoraa 5mm talttaa joka sattui löytymään työkalujen joukosta. Sillä tuli aika rouheaa jälkeä. Hain talttasarjan rautakaupasta, jolla sai selkeästi parempaa jälkeä.
Reikien tekeminen on hidasta puuhaa…Neliöt reiät tein värähtelevällä monitoimityökalulla.Kaikki kolme kättä sorvasin yhdestä puustaTeline johon saa ison pölkyn ripustettua.Jalassa riitti liimaamista.
Lopuksi viimeistelin osat hiomalla, jonka jälkeen vahasin ne. Oikein väri olisi ollut mahonki, mutta lähin mitä löytyi oli punatammi.
Eka kerros vahaa kuivumassa.Jalka
Vahatessa tuli virhe. Olisi pitänyt levittää vaha vaahtomuovisienellä sutimisen sijasta, niin olisi tullut paljon tasaisempi pinta. Ensin koitin kankaalla, joka imi lähes kaiken itseensä ja uskoin että vaahtomuovilla kävisi vielä kehnommin. Kuulemma ei. No nyt tiedän.
kiinnikepalkki ja pultti sisällä.
Junttasin kiinnikepalikoihin jatkomutterin ja pultin läpi. Ei niihin koskaan tulee kovin paljoa voimaa kohdistumaan, mutta näin se oli helpoin tehdä.
Valmis!Tästä kuvasta näkee hyvin kuinka epätasainen pinta todellisuudessa on.Kädet ovat vähän rosoiset, mutta ei niistä sentään tikkuja saa.
Täällä taas kirjoittelen. Nyt ei ole niin vaikea työ kuin mitä edelliset olleet. Lähinnä vaan puutöitä ja valmiiden moduulien sijoittelua.
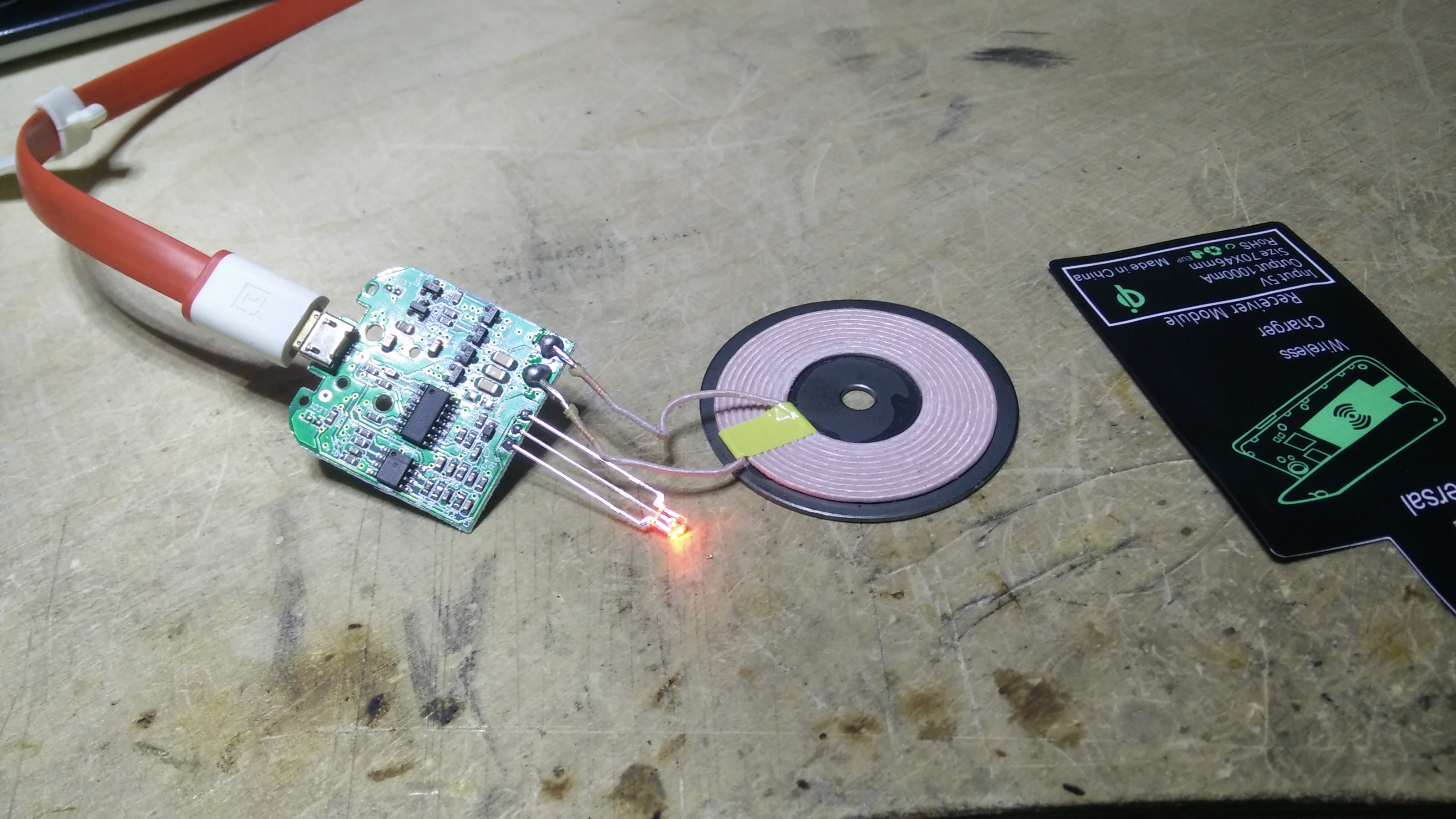
Eli kuusi QI-lähetintä, joilla voi latailla kaikkia QI-protokollaa tukevia laitteita.
Moduulit ovat kytketty erikseen kahden 5V/2A virtalähteen perään. Eli kolmella moduulilla on varaa kuluttaa yhteensä 2A.
Upotin moduulit pöytään ja valoin polyesterihartsin päälle. Näin pinta on tasainen ja latauspaikatkin näkyvät.
Ei havaitse vastaanotinta.Havaitsee vastaanottimen!Vähän paremmin aseteltu.
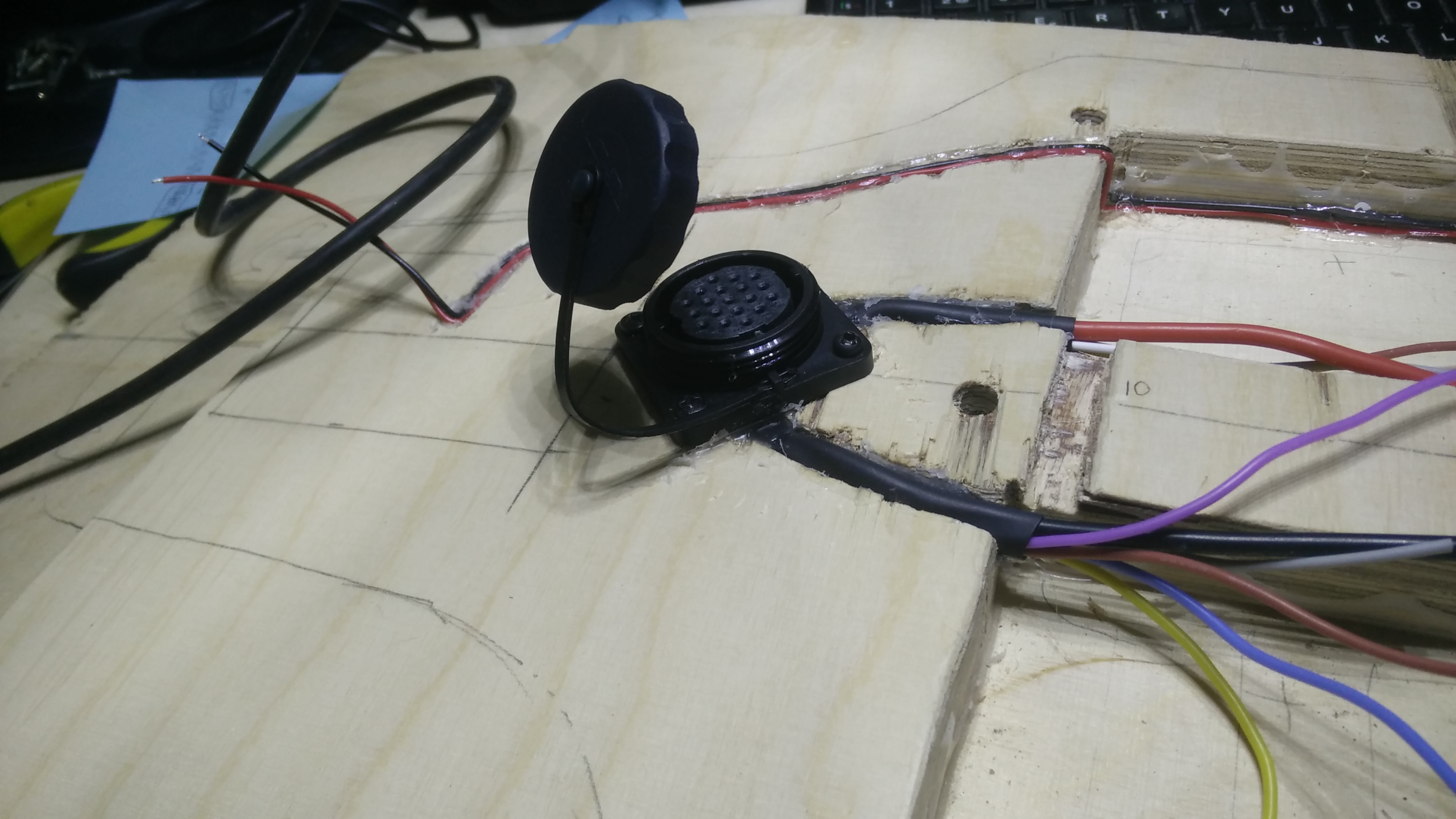
Lisäsin kolot aiemmin tekemääni sohvapöytään.Sähköä sisään.
Parempi vaihtoehto olisi ollut sittenkin että kytkin ja johdon paikka olisivat olleet pöytätason alla. No menee se näinkin kun ehdein jo tehdä.
Toimii!Pohjasta.Virtakytkin ja pistoke.Ilman valoja.Valojen kanssa.
Hartsi olisi muuten riittänyt tasaiseen ja kiiltävään lopputulokseen, mutta käämikolojen täyttämisessä oli kolmeen jäänyt aukkoja, ja hartsi valui pois.
Kunhan jossain vaiheessa hankin lisää hartsia, niin saan viimeisteltyä pöydän loppuun.
Tein uuden artikkelin, koska tämä käsittelee jo erilaista lautaa kuin aikaisempi artikkeli, ja muutenkin tulee selkeämpää sisältöä kuin että ynnäisin tämänkin samaan.
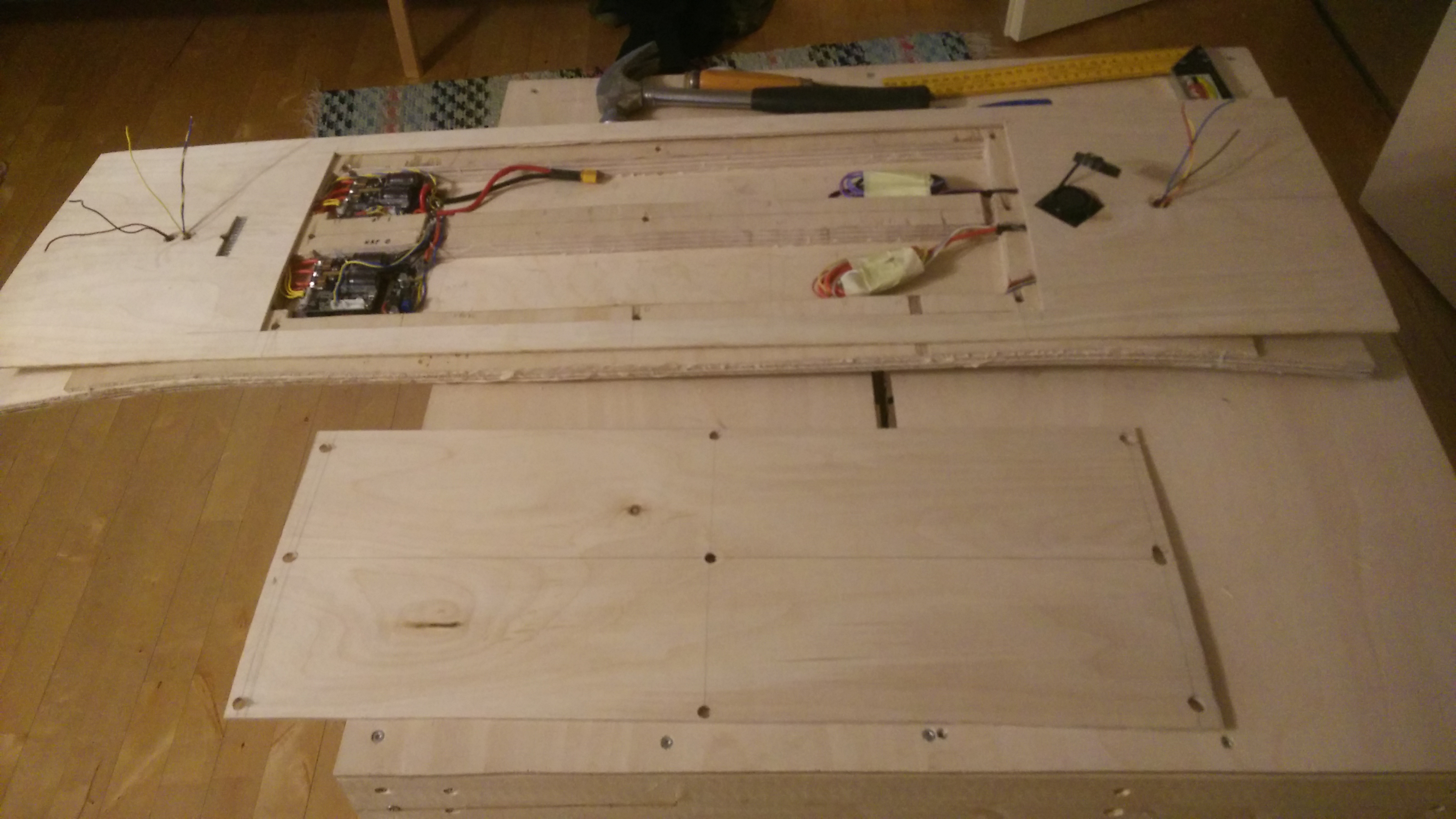
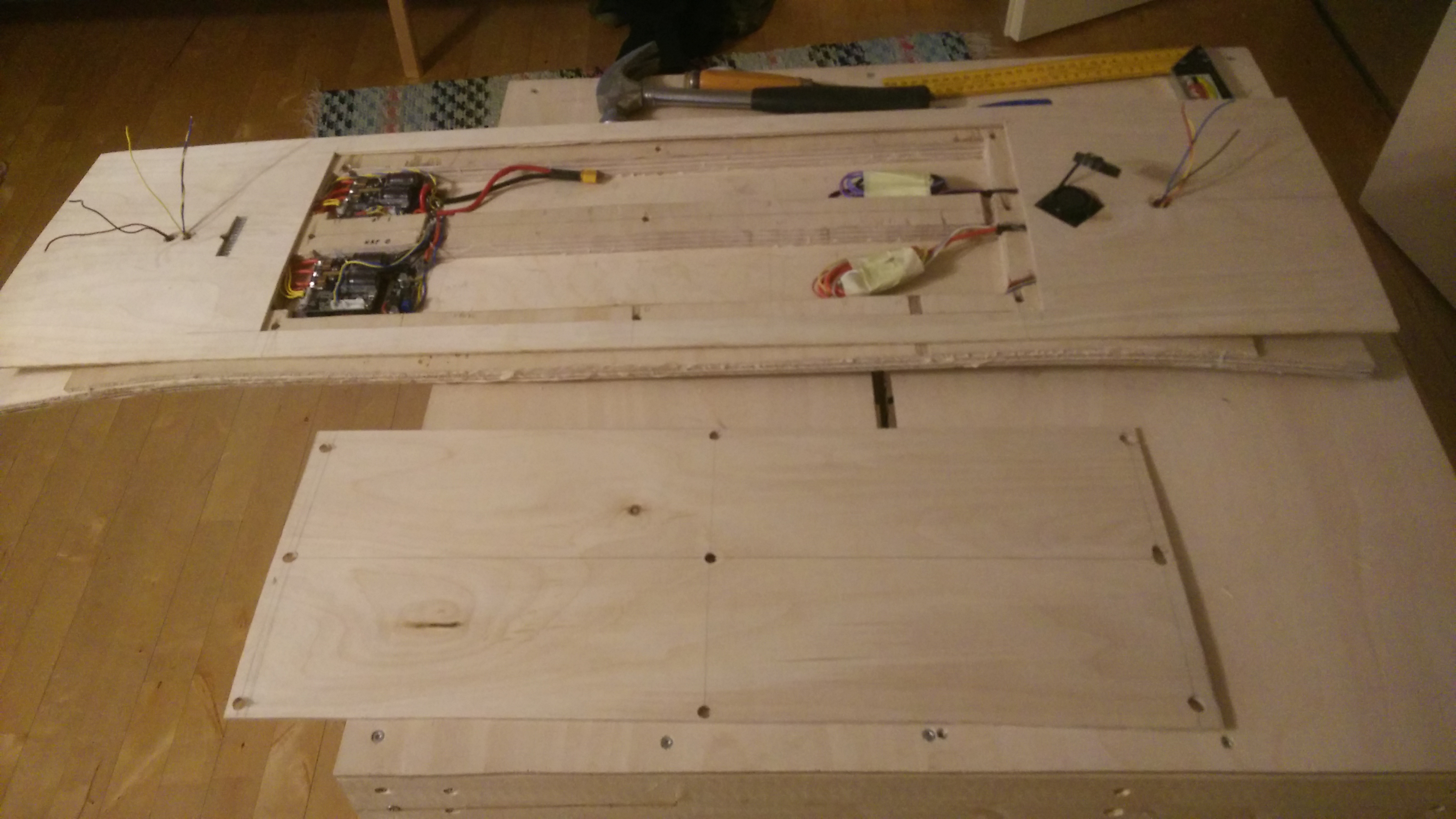
Eli tämän laudan tavoitteena on helppokäyttöisyys ja esteettisyys. Eli kaikki mahdollinen on rakennettu laudan sisään, joka helpottaa puhdistusta. Myös maavara kasvaa koska pohjassa ei ole yhtään laatikkoa. Moottorin liitinkin on helposti irroitettava.
Edellisissä laudoissa ongelmana oli käytännöllisten ja matalien koteloiden tekeminen. Tässä ei ole tarvinnut huolehtia siitä, vaan pohjassa on vain yksi iso luukku josta pääsee kaikkeen käsiksi. Huonona puolena on että lauta on 28mm paksu.
Moottoreina toimii kaksi kiinalaista suoravetomoottoria(eng. hub motor), teho 550W ja 70rpm/V (nimitys KV) ja pyörien halkaisija on 90mm.
Moottorikontrollereina kaksi FOCBoxia, jotka perustuvat VESC-kontrolleriin.
18650-akkukennoja mahtuu 50kpl, joten akuksi tulee 10S5P (10 sarjassa, 5 rinnan). Teen akun INR18650-35E-kennoista, joiden kapasiteetti on 3450mAh ja jatkuva purkuvirta 10A, joten akusta tulee noin 17Ah, 50A virralla.
Tein aikaisempaan 10S3P-akun kyseisistä kennoista, ja se tuntui hieman tehottomalta paikoin. LiPo-akennoissa tätä ongelmaa ei ole, koska niissä on moninkertainen virranantokyky verrattuna näihin kennoihin. Purin kyseisen akun, ja otin siitä kennot tähän uuteen akkuun.
Tässä laudassa on vielä 11-johtoinen latausliitin balansoivaa laturia varten, mutta tulevaisuudessa tulen asentamaan BMS-moduulin lautaan mukaan, jolloin lataukseen riittää pelkkä 42V virtalähde ja kaksinapainen liitin.
Kumpaankin päätyyn upotin valot jotka tein kahdeksasta 10mm LEDistä, kirkkaat eteen ja punaiset taakse. Niille oli tarkoitis kovertaa kolot, mutta säästin vanerissa ja laitoin pohjimmaiseksi alimittaisen palan. Tuli siitä silti hyvä.
Sain vinkkinä että valot voisivat vaihtaa väriään kulkusuunnan mukaan, mutta se idea voisi tulla vasta seuraavaan lautaan.
Tällä kertaa sain pohjaan taiteellisemman kuvan. Karjuva tiikeri!
Laudan painoksi kaikkineen tuli 9,7kg. Edellinen lauta oli noin 9kg. Paino pysyi siis käytännössä samana. Jos vielä kevyemmän haluaisi, niin pitäisi runko tehdä hiilikuidusta. Se olisikin mielenkiintoinen(ja kallis) kokeilu.
Laudan kustannukset oli suurinpiirtein:
2x FOCBOX – 260€
Bluetooth ja NRF – 5€
Liittimiä, kytkimiä, johtoa, LEDit yms. – 20€
Suoravetomoottorit – 116€
Akusto(50 kennoa INR18650-35E) – 185€
Itse lauta, eli vanerit, liima ja hartsi – 20€+5€+15€ = 40€
Yhteensä: 626€
Laudan ulkopuoliset osat:
Kauko-ohjain – 50€
Laturi – 110€
Ensin puristetaan vaneria yhteen…Pistosahalla isot kolot ja kantta varten iskumutterit. Myöhemmin huomasin että olisi kannattanut olla 4 tai 5 mutteria kummallakin laidalla, koska kansi tykkää irvistellä noista pitkistä väleistä.Osien sovitusta.Urat johtoja varten.Kontrollerit ja moottorin liitin paikalleen.
Moottorin liittimeksi valitsin ns. ”ATX”-liittimen, eli Molexin 22-pinnisen PC-liittimen. Vaiheet ja hall-anturisignaalit menee samassa liittimessä.
Latausliitin.Latausliitin kutistesukatettu ja kiinnitetty paikalleen.Kokonaiskuvaa.Moottorien liitin vaatii vielä jotain kutistesukan tapaista……johon laitoin vulkanoituvaa teippiä.Urat ja johdotukset peittävä kerros……jonka liimaus ei mennyt ihan nappiin. Siinä liimautuu päädyt uudelleen.…Ja toinen pääty.Hyvin liimaantui lopulta, liittimen ilmeestä huolimatta 🙂Siitä näkee hyvin laudan paksuuden, joka on 28mm.Lauta on sahattu muotoonsa. Pitää vielä sahata ja hioa kulmikkuutta pois.Upsista. Siinä meni valojen kytkimen piuha….…joka piti laittaa uusiksi pintavetona.Hiomakoneen ja mattopuukon jälkeä joka kuitenkin pyöristyi pikkuhiljaa.Valoja, puoliksi upotettuina.960A virtaa pistehitsauskoneesta. Riittää varmasti.…kuten kuvasta näkyy. Ja vielä kaksi kerrosta nikkelinauhaa.Akut pitimessä.Akkujen sovitusta. Laudan virheä väri tulee lähinnä päällipuolelle.Akut kytketty paikalleen. Tätä myöten laudan sisäpuoli on valmis.Iso tikru tulostettuna ”water slide decal”-paperille. Eli tulostetaan, liotetaan vedessä ja asetellaan halutulle pinnalle.Komea tuli. Viimeinen pala epäonnistui.Maalasin reunat ja puuttuvan alueen. Maalasin mustalla vielä, koska tuo ruskea erottui liia hyvin.Kuviota pintaan.Alapuoli laminoitu polyesterihartsilla.
Tässä kohtaa huomasin että laminointi olisi kannattanut tehdä paremmin. Luotin siihen että kansi on tarpeeksi tiivis. Hartsia oli kuitenkin päässyt valumaan kannen alle, ja se oli paisunut pikkasen nostaen kantta. Mutta sitä tuskin huomaa.
Olisi siis pitänyt käsitellä kansi ja lauta erikseen. No kaikesta oppii.
Yläpuolikin valmis. Hiekkapaperin päälle suihkuttelin vielä kevyesti lakkaa. Helpompi putsata kurasta.Virtakytkin mukavasti telin kätköissä.…kuin myös valojen kytkin.Siinä se latautuu.Maavaraa on!
Alunpelin piti laittaa lasikuitumattoa hartsin lisäksi vahvistamaan, mutta siitä ei olisi kuitenkaan ollut mitään hyötyä, muuta kuin ulkonäkö olisi vähän muuttunut. Jos luukku olisi päällipuolella, niin sitten olisi pohjaan voinut laittaa yhtenäisen maton joka tuo lujuutta.
Sähköpyörä oli ihan hyvä, muttei omasta mielestäni kovin käytännöllinen. Sitä rakentaessani tutustuin VESC-moottorinohjaukseen joka on tarkoitettu rullalaudoille.
Ensimmäisenä hankin tavallisen skeittilaudan. Asensin moottorin kiinnikkeineen, kontrollerin ja akut. 3D-tulostin kotelot kontrollerille ja akuille. Akut olivat LiPo-kennoja jotka purin kaverin vanhoista paketeista.
Tästä versiosta ollaan menty jo paljon eteenpäin kuten tulet huomaamaan lukiessasi.
Moottori, moottorikiinnike ja voimanvälitys
Kiinnike ei pysynyt millään kiinni. Ei auttanut locktitet tai muutkaan viritykset. Tärinä on sen verran kovaa että se pitää hitsata kiinni.
Koitin hitsata sitä, heikoin tuloksin. Matalalämpölangalla ja butaani-propaani-soihdulla jolla pitäisi alumiinin hitsautua nätisti. Kävikin ilmi että kiinnike oli todennäköisesti alumiini-sinkkiseosta.
Muotoilin ihan oikeasta alumiinista uuden kiinnikkeen:
Vein hitsattavaksi ja maalasin päälle. Nättiä jälkeä.
Tuli sitten uusi ongelma. Tuo alumiini oli liian ohkasta. Se pääsi vääntymään jatkuvasti jolloin hihna luisti ja kului nopeasti. Korjasin kuitenkin kiinnikkeen tekemällä tukipalkin, ja laitoin sen toiseen lautaan.
Tein kummallekin puolelle laakerit. Nyt vaikuttaa paljon jämerämmältä, mutta aika näyttää millainen on.
Tein myös uuden paksumman kiinnikkeen ja hitsautin. Tämä kiinnike epäonnistui monella tapaa:
Hihnapyörä on jumittunut paikalleen
moottorin yksi kierre on pyöristynyt rikki
olen tehnyt pulteille turhaan syvennykset kiinnikkeeseen, jotka haittaavat kiristämistä
pienemmästä hihnapyörästä kuluneet hampaat pois
kiinnike liian kaukana pyörästä
Pyöränpuoleinen hihnapyörä oli m2-pulteilla kiinni, jossa oli vääntövoimaan nähden liian pienet kannat jotka pyöristyivät rikki jatkuvasti, ja lopulta lähtivät vielä irti kesken ajon. Vaihdoin tilalle m3 tankoa, kiinnitin locktitella paikalleen ja lukkomutterit toiseen päähän.
Moottoritkin alkavat näyttää kiinalaisuutensa. Halvat moottorit eBaystä. Kummatkin pitävät ääntä tietyssä kohtaa kiihdyttäessä. Toinen enemmän, toinen vähemmän, kuin rälläkällä hioisi. Toisessa heti alussa meni yksi käämi poikki, ja luulen että yksi magneeteista on irronnut…
Suoravetomoottorit ja uudet kontrollerit
Suoravetomoottorit(550W/kpl) ja uudet kontrollerit(FOCBOX) saapuivat. Niissä ei ainakaan ole hihnaongelmaa.
Siinä näkyy pyörissä vähän kokoeroa. Uudet ovat 90mm kun vanhat 70mm
Akku ja lataus
Myös akku on käynyt muodonmuutosta läpi. Ensimmäinen versio oli kaverin antamat akut jota hän on käyttänyt lennokeissa. 2,2Ah kennoja. En viitsinyt alkaa mittailemaan todellista kapasiteettia, vaan tein suoraan paketin. 7S2P, eli aina kaksi rinnan ja 7 sarjassa.
Jälkimmäisessä kuvassa näkyy myös BMS asennettuna. Myöhemmin kävi ilmi että BMS meni jatkuvasti rikki ja tuhosi muutaman kennon.
Siinä näkyy kennot paremmin aseteltuna. Koitan pitää maavaran mahdollisimman suurena.
Siinä lataus- ja käyttöliittimet:
Kun olin aikani ajellut, niin päätin hankkia paremmat akut. 20kpl 5Ah LiPo-kennoja joista tein 10S2P-akun, eli 42V/10Ah.
Tein toisenkin akun vanhoista kennoista, jolla pitäisi päästä noin 3km verran kulkemaan:
Luovuin kuitenkin BMS:sta kokonaan, koska se ei ollut yhtään luotettava millään tavalla. Sen sijan VESC katkaisee virran kun jännite tippuu tarpeeksi, ei noin 32-34V kohdalla.
(Lisätty 27.2.2018) Ostin 18650-kokoisia Li-Ion-akkuja ja kunnollisen pistehitsaimen.
Tein 10S3P-paketin 3450mAh(10A virranantokyky)-kennoista, joten siitäkin tuli noin 10Ah/360Wh paketti 30A virranantokyvyllä. LiPo-kennoihin verrattuna virranantokyky on paljon heikompi ja jännite tippuu hetkellisesti käytössä paljon enemmän. LiPolla tätä tippumista tuskin huomaa.
Ja siinä pistehitsi joka ottaa virtansa auton akusta. ”Arduino spot welder 3.1”.
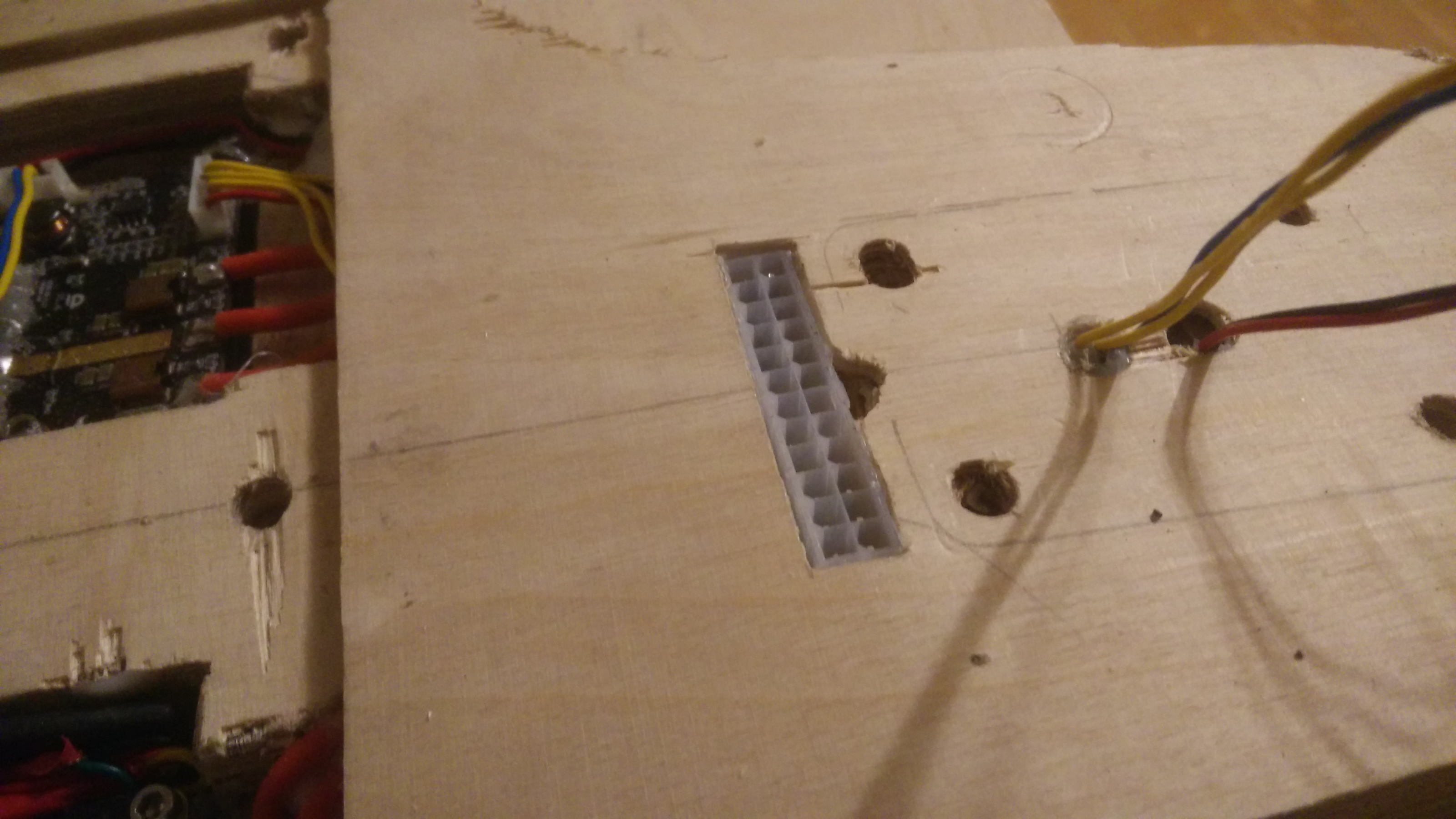
(Päivitetty 12.9.2017) Lisäsin 12-pinnisen liittimen(josta 11 käytössä) jolla lataan akut balansoidusti. Liittimen malli on SD28-12, jossa SD28 on sarja ja 12 pinniluku. 28 on myös liittimen ympärysmitta. Tilasin myös 19-pinnisiä liittimiä eli SD28-19, jolla saan enemmän pinta-alaa ensimmäiselle ja viimeiselle sarjassa. Kun 19-pinniset liittimet tulivat, kävikin ilmi että ympärysmitta olikin paljon suurempi.
Olisin voinut ostaa ihan kunnollisen laturin, mutta tee-se-itse-henki vei voiton. Kyseinen laturi jonka tein, antaa jokaiselle kennolle 1A virran. Kyseinen laturi sisältää 10kpl latauspiirejä jotka ovat toisiltaan eristettyjä, joten jokaisen perässä on oma virtalähde. Myös jännitteet näkee kennokohtaisesti.
Tuo latailee 10Ah akun kymmenessä tunnissa. Tarkoitus on lisätä 42V laturi/virtalähde vielä lisäksi jolla latausaikaa saisi pienennettyä. LiPo-kennot kestävät yleisesti ainakin 1C virran, eli 1 x kapasiteetti = 5Ah = 5A ja niin edelleen. Meinaan kuitenkin laittaa ehkä 2-3A laturin.
Niiden lisäksi pitäisi tehdä jotain älyäkin tuohon, eli mikrokontrolleri haistelemaan jännitteitä ja katkaisemaan latauksen. Nuo latauspiirit kyllä katkaisee latauksen, mutta tuntuu odottelevan liian pitkään ennenkuin katkaisee.
(Lisätty 27.2.2018) Kaikenlaista kiirettä ollut niin ostin suosiolla kunnon laturin. iCharger 1010+
Kontrolleri, kauko-ohjain ja muut elektroniikat
Kuten jo mainitsin, niin moottoria ohjaa VESC. Todella monipuolinen ohjelmoitava vapaan lähdekoodin kontrolleri.
Kuvassa moottoriohjainpiirin vaihto-operaatio
Seuraavassa kuvassa näkyy NRF-moduuli antennilla, kauko-ohjainta varten.
Kontrollerin asetusten säätäminen käy BLDC Tool-ohjelmalla. Ohjelmaa ei ole dokumentoitu juuri mitenkään, joten sitä ei kannata paljoa säätää, lähinnä vain pakolliset. Onneksi alkuun pääsee helposti, sillä moottorin tunnistus on tehty automaattiseksi.
Kun akun liittää kontrolleriin, niin siitä syntyy iso kipinä, joka alkaa kuluttaa liitintä pikkuhiljaa. Sitä varten tein kipinänestokytkennän. Pari IRF7530-fettiä ja kytkin, niin ei tule kipinää, ni virrat saa päälle kytkimestä.
Ja siinä näkyy toinen kontrolleri:
Seuraavassa kuvassa näkyy FOCBOX. Sama kontrolleri, mutta paljon laadukkaampi. Avasin tarkistaakseni kunnon, ja hyvältä näyttää. Ne on jokainen testattu ennen lähetystä, joten siinä ei ole huolta. Nuo vasemmassa yläkulmassa olevat FETit ovat uudenlaisia DirectFETtejä. Se o kiva kun nuo sitten yleistyy enemmän ja pitää korjata joku laite, kun ei voi edes mitata kunnolla…
Tilasin kaksi FOCBOXia, koska kaksi moottoria vaatii kaksi kontrolleria. Tässä tapauksessa suoravetomoottoreita. Kiinnitin kummatkin tukevasti alumiinilevyyn.
Niissä on nyt siis antispark-kytkentä, bluetooth kännykkää varten, ja NRF kauko-ohjainta varten. Ja kontrollerit ovat toisissaan kiinni CAN-väylällä:
Sain testattua, ja kaikki tuntuu toimivan hyvin paitsi kontrollerit eivät löydä moottorien hall-antureita. Ne ei vaikuta ajoon muuten kuin liikkeellelähdössä. Eli ne on vain ”kiva” ominaisuus lisää. Mutta pitää selvitellä mikä on vikana. Sen verran sain testattua että itse hall-anturit ovat ehjiä ja antavat signaalia.
(Lisätty 20.11.2017) Sain hall-anturit toimimaan. Vikana oli väärät merkinnät FOCBoxin tarrassa. T ja H3 olivat ristissä, joka tarkoittaa että vain kaksi anturia kolmesta oli ohjelmistolle näkyvissä. Oikea järjestys FOXBoxissa: GND, Hall1, Hall2, Hall3, Temp, 5V. Nyt kun anturit ovat oikein kytkettynä, niin ohjelmistokin tunnistaa sen. Nyt pääsee lähtemään paikaltaan eikä tarvi potkaista lautaa vauhtiin. Pieni hyöty, mutta hyöty kuitenkin.
Tässä vielä linkki josta sain tiedon: http://www.electric-skateboard.builders/t/new-improved-focbox-official-thread/11102/433?u=quezacotl
Nyt noissa FOCBOXeissa, nimensä mukaan, toimii FOC-ohjaus, eli kontrolleri puskee siniaaltoa moottorille. Kytkentätaajuuden saa säädettyä itse, jonka olen laittanut 40kHz:lle, jolloin moottorit toimivat lähes äänettömästi. Todella suuri ero verrattuna normaaliin BLDC-ohjaukseen joka pitää kovaa ääntä.
Asensin kontrollereihin myös uuden ohjelmiston, joka on normaalia hieman parempi. Päätoiminto on että sillä saa kaasua ohjattua virta- ja hyötysuhteen lisäksi myös tehoprosentin mukaan. En ole vielä ehtinyt testata kuinka hyvä se on kun säädetään tehoprosentilla kulkua. Toinen hyödyllisyys on että kaasun käyttäytymistä, eli kiihdytystä saa säädettyä paremmin.
Asensin myös bluetooth-moduulin HM-10, jotta saa hallittua kännykällä eri ohjausmoodeja ja muita, ja näkee hyödyllisiä tietoja. Kätevä jos kaverit haluaa testata, niin voi laittaa hillitymmät asetukset päälle.
Siinä pari kuvaa yhdestä testistä. Riittäisi jopa että teen pienen laatikon ja kiinnitän ”keulaan”. Helppo testata niin. Kuitenkin teen aina omat laatikot kontrollerille ja akulle pohjaan.
Ajovalot (päivitetty 26.10.2017)
Alkaa illat hämärtymään, niin tein ajovalot. 15kpl 10mm lämpimänvalkoisia LEDejä. Kolmen aina sarjassa. Välissä DC-DC-hakkuri tiputtamassa jännitettä 42V -> 9,6V.
LEDejä ohjataan kytkimellä virtakytkimen vierestä. Jollei kontrollerit saa virtaa, eivät myöskään LEDit. Myös tuo kytkentä saa aikaan kipinän kun laittaa päälle, joten se oli kätevintä laittaa olemassaolevan anti-spark-kytkennän taakse.
Asennan vielä punaiset takavalot kunhan sellaiset saapuvat Kiinasta.
Punaiset LEDit saapuivat, ja asensin ne paikalleen. 9kpl, eli 3 sarjassa ja 3 sarjaa rinnan, ja vastus perässä jotta saadaan kytkettyä samaan DC-DC-muuntimeen. Tällä kertaa yhdistin LEDit toisiinsa 3D-kynällä, ABS-muovilla, ja sulatin vielä korotuspalaan kiinni, niin pysyy hyvin kiinni.
Etuvalotkin pitäisi laittaa samalla tavalla, sillä kuumaliima ei pidä kiinni läheskään yhtä hyvin kuin ABS-muovi. Itse asiassa paras ratkaisu olisi telin korotuspala jossa olisi valot valmiina. Olisi siistimmän näköinenkin.
Kauko-ohjain
Sähkörullalautaa ohjataan langattomalla kauko-ohjaimella. Siihen löytyi valmiit gerberit ja ohjelmat. Eli Wii nunchuk-ohjaimesta sisälmykset pois ja omat tilalle.
Tuon ohjaimen kanssa tuli ongelma joka vaati että ohjain joudutaan aktivoimaan aina joko liittämällä Windows-koneeseen tai avaamalla BLDC_Toolin, eli kunhan jokin yritti jutella sen kanssa, niin alkoi toimia. Mietein ja testailin sitä jonkin verran. Vika on siinä että CP2102-piiri joka hoita USB-sillan, ei osaa ottaa RTS-signaalia pois käytöstä, vaan pitää sen aina päällä.
Seuraavassa kuvassa näkyykin kun varmistin että piiri on oikeasti kunnolla juotettu. Juotin joka pinnin erikseen. Ei auttanut. Sen jälkeen ostin Mouserilta varmasti aitoja piirejä, edelliset kun oli eBayn kautta. Ei auttanut sekään. Paras ratkaisu tähän mennessä on ollut että katkaisen RTS-signaalin. Sen signaalin katkaisu vaikuttaa vain piirin ohjelmointiin, ei muuhun.
Puuttuu kuvia lopullisesta versiosta. Eipä siinä ole kuin akku vaihdettu ja kytkin lisätty.
Nopeutta säädetään tattia liikuttamalla eteenpäin, toista nappia pohjaan painamalla saa cruise-moden, eli nopeus lukittuu. Toisesta napista taas vaihtuu suunta.
Rullalaudan tekeminen
Ensimmäinen versio oli tosiaan valmis skeittilauta tokmannilta. Perus temppulauta johon vaihdoin 70mm pyörät. Se oli muuten hyvä, paitsi telit oli vääränlaiset moottorikiinnikettä varten. Skeittilaudoissa on tavallisesti normaalit telit (Traditional KingPin) kun taas longboardeissa on käännetyt (Reverse KingPin). Yksinkertaisesti normaaliteleissä moottorikiinnike tulisi osoittamaan ulospäin laudasta ja käänteisessä sisäänpäin. Telin muoto estää kiinnikkeen asennuksen toisinpäin.
Myös skeittilaudan lyhyys muodostui ongelmaksi kahdella tapaa; suuremmalla nopeudella tasapaino kärsi, sekä elektroniikat eivät mahtuneet paikoilleen.
Ensin hain 4mm koivuvaneria. Piirsin laudan muodon (100cm/25cm) ja liimasin kolme levyä erikeepperillä toisiinsa.
Prässi
Kokosin laudoista prässin jolla saa taivutettua laudan muotoonsa. Muodolla ei ole niin väliä, kunhan se on taivutettu. Muoto pitää sitä taipumasta vääriin suuntiin. Lauta oli prässissä yön yli.
Sahattu ja hiottu
Tällä kertaa en tehnyt mitään 3D-tulostamalla. Pelkkää liimaa, pultteja ja puuta. Eli kontrollerin ja akkujen kotelot myös puusta.
Hautasin virtajohdot lautaan:
Ostin epoksihartsia ja lasikuitumattoa. Maalasin laudan ja käsittelin alapuolen. Tämä oli siis täysin valinnaista. Tulee hiukan kestävämpi ja nätimpi, ja suojaa maalipintaa ja puuta.
PäällipuoliHyvin hautautuiJesari toimii hyvin ennen lopullista kiinnittämistä.
Isompi akku
Ainoat 3D-tulostetut osat, raiserit. Eli lauta nousee 10mm verran korkeammalle, jolloin telissä kiinni olevalla moottorilla on enemmän liikkumatilaa eikä se pääse järsimään lautaa käännyttäessä.
Ylimääräinen hartsi täyttää hyvin portaikon ruuvinreiät
Tein samalla toisenkin laudan. Johdotukset ovat siinä hiukan paremmin verrattuna ykköslautaan. Siinä on elektroniikka kiinteänä, mutta tuleville akuille pitää keksiä jokin muu kuin ratkaisu kuin jesari.
Siinä suoravetomoottorit ja 2x FOCBOX kotelossaan.
(Päivitetty 24.9.2017) Kontrollerien kotelo maalattu ja suojattu.
Yhteenveto
Sähkörullalaudalla pääsee siis maksimivauhtia 36km/h, ja noin 25km matkan. Olen mennyt jo useita kertoja töihin(9km) ja muuallekin. Lauta on saanut vettäkin kostealta asfaltilta, ja vielä toimii. Nämä pätee siis hihnavetoiseen moottoriin.
(Päivitetty 24.9.2017) Suoravetomoottoreilla laskurin mukaan olisi merkittävästi huonompi hyötysuhde. Kun yhdellä hihnavetoisella pääsisi 33km, niin kahdella suoravedolla vain 13km. Olen testaillut, ja se ei pitänyt paikkaansa, sillä suoravedolla tuli samanlaiset nopeudet ja matkat kuin hihnavedolla.
Olen siis vertaillut välillä; yksi hihnaveto(1820W/270KV) – kaksi suoravetoa(550W/70KV), ja niiden välillä ei ole mainittavaa eroa.
10Ah/37V akku + 2 kontrolleria + suoravetomoottorit + lauta painavat yhteensä noin 9kg.
Ongelmina on ollut että hihna on hyppinyt jatkuvasti ja hampaat sitä myöten kuluneet. Tähän auttoi kun laittoi laakerin painamaan hihnaa toiselta puolelta, ja luullakseni melkein lopullisesti kun laitoin toisellekin puolelle, jolloin hihna liikkuu kahdeksikon muotoisesti. Tämän ongelman parissa painein todella paljon.
Tilasin suoravetomoottorit. Oikeastaan teli jossa kaksi moottoria valmiiksi kiinnitettynä. Ne ovat toimineet todella hyvin, myös ylämäessä, enkä ns. tyhjää pyörimistä ole havainnut lainkaan.
(Päivitetty 28.10.2017) Nyt on tullut ajeltua useimpia satoja kilometrejä. Tarkkaa tietoa ei ole, koska en ole käyttänyt kännykän seurantaohjelmaa ensimmäisen 100km jälkeen. Alkuun käytin sitä ohjelmaa jotta sain säädettyä kiihdytyksen ja jarrutuksen sopivaan pisteeseen jossa en horju laudalla kiihdyttäessä, enkä lennä äkkijarrutuksessa.
Siinä näkyy kiihdytys keskeltä ylöspäin, ja jarrutus alaspäin. Eli maltillinen kiihdytys mutta kuitenkin tarpeeksi nopea. Jarrutus taas noemaalia pienempi alussa, ja suurempi kun suuremmat (äkki)jarrutukset saatu pois.
Tutkein myös mitä tulisi maksamaan jos tekisi maastomallin laudasta:
2 suoravetomoottoria ilmatäytteisillä pyörillä
2 ilmatäytteistä pyörää
telit
Noin 350€
Kustannuksia
Siinä vähän kustannuksia mitä meni kaikkeen. Pyöristettynä ne mistä en löydä täsmällistä hintaa. Osa on vasta tulon päällä. Jonkinnäköinen hajatelmalista.
ohjelmointilaite VESCille – 2€
HM-10 bluetooth – 4,80€
2x VESC – 85€/kpl
2x FOCBOX(VESX-X) – 130€/kpl
Laturi ja akut:
10kpl 1A 5V powereita – 32,79€
10kpl laturipiirejä – 6€
5 paria XT60-liittimiä – 3,33€
laturi 7S-paketille – 16€
Ekat testiakut – 35€
kunnolliset 5Ah akut 20kpl – 120€
12pin liitin 5,82€
Lauta:
Tokmannin skeittilauta – 20€
telit – 25€
toiset telit, 25,50€
grippiteippi – 10,36€
toinen grippiteippi – 5,70€
vetopyörät 70mm pyörille – 13,41€
70mm pyörät 15,47€
2x moottori (270KV) – 64€
Kiinalainen moottorikiinnike – 11,10€
omatekoiset kiinnikkeet – 10€
hihnat – 2,2€/kpl
4 pyörää – 20€
uusia laakereita – 15€
80mm pyörät – 14,60€
80mm pyörille hihnapyörät – 8,77€
suoravetopyörät+teli – 116€
Kauko-ohjain (oikeastaan 2kpl):
nrf-moduulit 5kpl – 4,90€
nunchuk – 5€
pieniä akkuja joista valitsin sopivan, – 20€
muita komponentteja – joku 15€ varmaan
piirilevyt – 20€
Ompas siihen uponnut rahaa… 1100€ Aikaisempaan mutuilin että ilman testailuja ja ylimääräisiä hankintoja, yhden laudan hinnaksi tulisi noin 450€. No kaksi lautaa löytyy jo, toisessa vaan on akkuja noin 3km reissua varten.
Talvi/maastolauta(Mountainboard)
Huomasin että rullalautoja on myös täytettävillä kumeilla, ja siitä tulikin ajatus jos tekisi myös talvikäyttöön laudan.
Tilasin pyörät suoravetomoottoreilla. Tulikin erilaiset kuin ajattelin. Yksi pyörä painaa 3kg, eivätkä ne olekaan ilmalla täytettävät.
Tilasin myös muut osat, eli 10mm akselilla olevat telit ja kaksi tavallista pyörää. Siinä on kaikki yhdessä testin vuoksi. Painoa jopa 10kg, eikä siinä ole vielä akkua.
Aluksi oli ajatus että rakentaisin laudan alumiiniosista, mutta luulen että puulauta on kuitenkin riittävä.
Unohdin ottaa kuvia kotelon sisältä, mutta tällaiset, eli 2 VESCiä sinne meni.
Siinä ajovalmis kokonaisuus. Väliaikaisena akun kiinnikkeenä ilmastointiteippi. En alkanut vielä laittamaan sitä kunnolla kiinni, koska tuo lauta taipuu jonkin verran. Saattaa olla että ostan 18650-kennoja, 40kpl 3450mAh kennoja (link) ja asettelen ne taipuisaksi kokonaisuudeksi. Tällä hetkellä taipuisuuden antaa ilmastointiteippi.
(Lisätty 30.11.2017) Ja tähänkin lautaan lisäsin valot. 2×9 LEDiä kummallakin puolella. Punainen vie 16V ja valkoinen 26V. Yhteensä vie 42V jolloin ei tarvisi step-down-muunninta, mutta jos niin tekisi, valot olisivat todella himmeät jo kun akku on alle 39V. Eli lisäsin LM2596-muuntimen 26V:lle ja 470R vastus perään 16V:lle.
Valot menee päälle omasta kytkimestä, kuitenkin vain kun kontrolleri on päällä.
(Lisätty 27.2.2018) Kyseinen lauta on osoittautunut liian epäkäytännölliseksi, sekä suurien renkaiden että painon vuoksi. Myös vetävät pyörät sutii liikaa eikä tehoa löydy tarpeeksi. Loppujen lopuksi huono lauta vaikkakin näyttävä.
Sen sijaan alan panostaa pienempään lautaan. Tein uutta kuviota renkaisiin liimaamalla pikaliimalla kuminauhan palasia. Toimii yllättävän hyvin ja on helppo uusiakin. Noin 20km matkan jälkeen ei näy mitään merkittävää kulumista.
Tällaiselta lauta nykyään näyttää:
Jalkaremmit on vain niitattu kiinni. Pysyy niin hyvin että saa tosissaan repiä irti.
Tein sitten omasta pyörästäni sähköpyörän. Oli taas pitkästä aikaa suurin projektini, joka vaati kaksi muuta asiaa, pistehitsikoneen tekemisen, sekä akkupakettien tekemisen, mutta lopulta sain (melkein) päätökseen. Onhan siinä vielä kaikkea pikkuista näpertämistä…
Ensin ostin 24V DC-moottorin jonka saa ketjuihin kiinni, sekä kontrollerin sitä varten. Moottori osoittautuikin liian hankalaksi kiinnittää pyörään, joten ostin 36V AC-keskiömoottorin sekä ohjaimen sille. Kuvaa pelkästä moottorista tai kontrollerista ei ole, joten näytän tämän kuvan. Eli 36V 350W kolmivaihemoottori.
Liitin joka siinä tuli mukana, oli sen verran outo että vaihdoin sen omaan.
Seuraavaksi piti opetella pinnoitus, eli rihtaus, eli pinnojen asentaminen ja säätäminen. Se oli lopulta aika suoraviivainen homma.
Käytin online-laskuria pinnojen pituuden määritykseen, kävin ostamassa pinnat ja nippelit(päätytapit) paikallisesta pyöräliikkeestä, ja aloin kiinnittämään pinnoja.
Rakensin ylläolevan kuvan kehikon, jolla sain säädettyä vanteen suoraan. Puuhun vaan tarkat merkit mikä on keskikohta ja niin edelleen.
Pyöreyden säätäminen oli helpompaa kun tuo oli ylläolevan kuvan mukaisessa asennossa.
Jostain luin että C# olisi aika optimaalinen sävel jossa vanteen pitää resonoida, niin silloin pinnat olisi tarpeeksi kireällä. Todellisuudessa näin ei käynyt. KUn aloin kulkemaan ekoja kertoja tuolla vanteella, kuului välillä pientä kilkutusta ja sain olla koko ajan säätämässä pinnoja. Lopulta kiristin kokonaisen kierroksen jokaista pinnaa tiukemmalle, eikä ole sen jälkeen enää oireillut.
Siinä eturengas johtoineen asennettuna.
Ja tässä kuvassa on kontrolleri piilotettuna putkiteipin alle, sekä jatkona 1Ah harjoitusakku. Akuista löydät lisää toisesta artikkelistani.
Kilikellon vieressä kaasunsäädin. Kaasupoljin, kaasukahva, virransuuruus-säätö-hall-anturi, throttle-in-english. Siihen olisi tarkoitus tehdä jonkinmoinen muokkaus ettei tarvitsisi koko matkaa pitää sormea kaasulla. Todennäköisesti poistan sisäisen jousen tai lisään vastuksen ja kytkimen jolla pyörä liikkuu taloudellisinta nopeutta.
Ja siinä kokonaisuus. Turhat asiat poistettu kuten 3-nopeus-kytkin josta ei tapahdu mitään merkittävää. Akun voi heittää(laskea varovasti) nyt takakoriin.
Itse kontrolleri on halvin kiinalainen mitä löytyy. Siinä tuli nippu johtoja alunperin. Jarrusignaali jota en saanut toimimaan. Itseoppimismode joka järjestää hall-anturien johdot automaattisesti joka on oikeastaan turha. Jopa peruustussignaali löytyi, mutta sekään ei toiminut. Lopulta ei jäänyt montaa johtoa, kolmivaihe, hall-antureille, kaasu(toimii jännitejaolla), sekä virransyöttö.
1Ah harjoitusakulla pääsi noin 18km polkimilla avustaen. Uudempi akku on 7,6Ah, joten sillä pitäisi päästä ainakin 136km polkimilla avustaen. On vielä mysteeri kuinka pitkälle käytännössä pääsee ilman polkemista. Maksiminopeus kuitenkin on 35km/h polkematta.
Moottori on mainosten mukaan 36V 350W joten sen pitäisi ottaa enintään 10A. Silloin 7,6Ah akulla pitäisi päästä 45min täydellä vauhdilla, joka tarkoittaa 26km polkematta.
PÄIVITYS (21.8.2017)
Pyörässä oli jatkuvasti vikoja. Hyytyi jo puolimatkassa mihin vaan. Otaksuin että vika olisi ollut moottorinohjauksessa. Vaihdoin sen VESC-moottorinohjaukseen.
Ongelma jatkui. Ohitin BMS:n ulostulon joka rajoittaa ulosmenevää virtaa. Se auttoi vähän.
Lopulta selvisi että vika olikin itse BMS-moduuleissa. Se meni joko jatkuvasti johonkin vikatilaan, tai sitten hajosi ladatessa. Huomasin myös että kun se oli osittain hajonnut ladatessa, niin myös muutama kennorivi oli mennyt huonoksi.
Olen nyt toistaiseksi luopunut sähköpyörästä. Se ei ole niin käytännöllinen, koska akku pitää viedä aina sisälle tai ottaa mukaan mihin meneekään, ja kun jättää pyörätelineeseen, niin se on liian kiinnostavan näköinen.
Olin tehnyt siitä vähän edistyneemmän näköisen:
Kontrolleri omassa kotelossaan:
Akku on myös 3D-tulostettu. Sekä akku- että kontrollerikoteloissa on banaaniliittimet, joilla ne yhdistyvät toisiinsa.
Maailmalla ollaan innostuttu rakentelemaan Li-Ion-akuista akkupaketteja, tarkemmin sanottuna 18650-Li-Ion-kennoista. Se tuntuu olevan kaikkein paras hinta/laatusuhteeltaan oleva litiumkennotyyppi. Voin olla väärässäkin, mutta kuitenkin se on todella yleinen.
Tässä artikkelissa keskitytään käytettyihin kennoihin, puoli-ilmaisiin, eli hinta-laatusuhteeltaan halvimpaan. Halvin keino olisi hankkia vaikka muutama lyijyakku romuttamolta, jolla saisi ihan kohtuullisen matkan ajettua. Meinaan kyllä testata senkin vaihtoehdon, sitten kun tulee sellaisia vastaan.
Mutta selvennetäänpä nyt muutamat perusasiat;
Kenno on yksittäinen akku jossa ei ole mitään suojausta. Akku koostuu useasta kennosta(voi olla yksikin) jossa on lataus/purkusuojaus. Akusto koostuu vähintään kahdesta akusta.
Ampeeritunnit (Ah) koostuvat ampeereista sekä tunneista. Esimerkiksi 1Ah akkua voi ihanneoloissa purkaa täydellä 1 ampeerilla tunnin ajan, 2 ampeerilla puoli tuntia, 0,5 ampeerilla 2 tuntia jne. Milliampeeritunti (mAh) on ampeeritunnin (Ah) tuhannesosa, eli 1000mAh = 1Ah.
Teho(Watti, W) lasketaan kaavalla P=U*I, eli teho=jännite*virta, eli watit=voltit*ampeerit. Wattitunti saadaan ampeeritunnista kyseisellä kaavalla. teho=jännite*ampeeritunti. Eli 1Ah * 3,6V = 3,6Wh
Ainakin litium-akkujen kokoamisessa käytetään merkitsemistapaa montako kennoa on sarjassa ja montako on rinnan. Jos esimerkiksi näet merkinnän 5S10P, niin 5 on sarjassa (Series, S) ja 10 rinnan (Parallel, P). Harjoitusakkuni on 5S10P ja lopullinen 10S10P.
Akun heikoin kenno määrää koko akun kunnon. Tähän poikkeuksena on älykäs balansointi.
Akut vaativat aina joko balansointimoduulin(BCM, PCB) tai ulkoisen balansoivan laturin, joista ensinnä mainittu on halvempi.
Tavoitteenani oli tehdä Li-Ion-akku sähköpyörään jolla pääsee töihin ja takaisin(18km). Onnistuin siinä tekemällä 36V 7,6Ah, 273Wh akun joka painaa 4,6kg.
Kennojen hankkiminen ja testaaminen
Keräsin noin 400kpl kennoja käytetyistä läppärin akuista. Jokaisessa akussa on noin 4-8 kennoa, joten akkuja oli purettavana noin 60kpl. Läppärin akut ovat todella hyvin suljettuja, joten paras keinon niiden purkamiseen tuntuu olevan taltta ja vasara. Myös pakastimessa käyttöä on ehdotettu, mutta kuulin vasta jälkeenpäin.
Läppäriakuista ei kannata ottaa mitään muuta talteen kuin itse kennot. Mukana tulevat latauspiirit ovat turhia lähes mihin tahansa paitsi alkuperäiseen tarkoitukseen.
Sain testattua kaikki kennot yksitellen 3A kuormalla ja 3V alarajalla, ja tällainen oli jakauma:
5% – 20kpl – 1000-1200mAh
5% – 20kpl – 600-700mAh
7,5% – 30kpl – 800-900mAh
10% – 40kpl – 900-1000mAh
10% – 40kpl – 700-800mAh
12,5% – 50kpl – 100-600mAh
25% – 100kpl – 5-100mAh
25% – 100kpl – alle 5mAh
Ei kovin häävi. Tästä näkee että jos haluaa 10S10P akun(100 kennoa), niin heikoin tulee olemaan noin 700-800mAh. Tein kyseisen 10S10P akun(7,6Ah), mutta jälkeenpäin ajateltuna 2kpl 10S5P olisi ollut parempi(4,6Ah ja 3,8Ah), sillä tuota kaikkea kapasiteettia ei kovinkaan usein tarvitse kerralla ja sitä paitsi kapasiteetit tulisi tehokkaammin käytettyä.
Käytin kolmea Li-Ion-laturia joihin sai yhteensä 12 kennoa kerrallaan. Sen jälkeen purin ne 3A kuormalla käyttäen elektronista keinokuormaa ZPB30A1, jonka jälkeen merkkasin kapasiteetin joka kennoon.
Käytin 3A kuormaa sen takia että saisin karsittua huonomman sisäisen resistanssin omaavat kennot pois. Ylläoleva lista näyttäisi noin 500-1000mAh/kenno hienommalta jos olisin käyttänyt 2A kuormaa, ja vielä hienommalta 1A kuormalla.
Akkujen rakentaminen
Akkujen yhteenliittämiseen käytin tekemääni pistehitsauskonetta(katso artikkeleitani). Pistehitsaus on parhaimpia tapoja tehdä akkupaketti, sillä se ei kuumenna kennoja liikaa, ja työkin käy nopeasti.
Kennot kannattaa liittää yhteen nikkeliliuskoilla. Mitä tehokkaamman akun rakentaa, sitä tärkeämpää on että nikkeliliuskat ovat täyttä nikkeliä, eikä nikkelipäällystettyä terästä, sillä nikkeli johtaa paremmin kuin teräs. Useilta foorumeilta löytyy tästä tietoa.
Sillä aikaa kun kaikki kennot olivat testauksessa, tein huonoimmista kennoista 10S4P-paketin, josta tuli 36V/1Ah. Sillä pääsi 18km matkan juuri ja juuri polkimilla avustaen. Tästä päätellen jopa 2Ah akku olisi moiseen matkaan vallan sopiva.
Alla näet ensimmäisen kunnon 1S10P (1,1Ah) paketin. Jos nuo olisivat sarjassa, niin niissä olisi yhtä paljon kapasiteettia kuin ylläolevassa.
Käytetyistä kennoista kun on kyse, niin sarjaankytkettyjen välissä kannattaa käyttää esimerkiksi Kapton-teippiä tai edes jotain eristettä oikosulkujen varalta. Allaolevassa kuvassa näet oikein tehtyjä paketteja.
Allaolevassa kuvassa olen jo kytkenyt kaikki paketit sarjaan.
Seuraavassa kuvassa olen asentanut balansointimoduulin akkuun. Tämä ei tee muuta kuin perusjutut, eli pitää kaikki sarjaankytketyt akkupaketit samassa jännitteessä sekä valvoo ylilatausta(>4,2V) ja ylipurkausta(<2,7V).
Sitten vaan suojausta. Kapton-teippiä ja vähän lasikuituteippiä.
Kokeilin ylläolevaa suojausta käytännössä, pyörän takakorissa, mutta se pääsi liikkumaan, naarmuuntui liikaa ja toi esiin oikosulkuvaaran. Seuraavassa kuvassa olen vuorannut paketin vielä pahvilla ja lasikuituteipillä. Lisäsin siihen vielä kantokahvan.
Akku on 36V nimellisjännitteeltään, ja sitä saa ladata 42V jännitteeseen asti, joten sopiva virtalähde siihen on 42V. Valitsin siihen 42V/2A virtalähteen, jonka pitäisi pystyä ladata kyseinen akku täyteen 3-4 tunnissa.
Latausliittiminä käytän yleistä 2,5mm DC-plugia/jakkia, ja virtaliittiminä 25A virran kestäviä liittimiä. Aion vaihtaa liittimet johonkin toiseen 3 pinniseen(yhteinen positiivinen napa, lataus sekä purku). Audioliittimet ovat yleensä hyviä.
Aion vielä testata akun 2A purkuvirralla. Näkee millainen kyseinen akku on löysemmillä arvoilla.
Kaikki alkoi siitä kun halusin tehdä sähköpyörän. Valitsin moottoriksi 350W 36V keskiömoottorin. 10Ah akkupaketin luulisi riittävän näin alkuun. Eli 3,6V kennoja 10 sarjassa ja 10 rinnan. Kennot ovat alakanttiin laskettuna ainakin 1Ah arvoisia. Se jääköön toiseen artikkeliin.
Mikä on pistehitsikone, mitä se tekee?
Pistehitsillä tarkoitetaan pienen pisteen äkkinäistä kuumentamista, joka sulattaa kappaleet toisiinsa kiinni. Pistehitsaaminen ei vaadi väliaineita kuten perinteinen hitsaaminen. Tämä kuumentaminen tapahtuu useiden satojen ampeerien ja muutaman voltin jännitteellä. Virta on se joka kuumentaa. Jos jännitettä on liikaa, niin se vain aiheuttaa kipinöintiä.
Oma pistehitsikoneeni antaa enintään noin 2kA ja 1,7V, eli 3,6kW mitä verkosta saa. En ole mitannut virtaa koska en ole nähnyt sitä tarpeelliseksi. Joku päivä saatan ehkä mitata sen.
Pistehitsikoneen voi tehdä verkkosähkömuuntajalla, kondensaattoripaketilla tai suoraan riittävästä akustosta. Tässä artikkelissa puhutaan verkkosähkömuuntajalla toteutetusta laitteesta.
Muuntaja
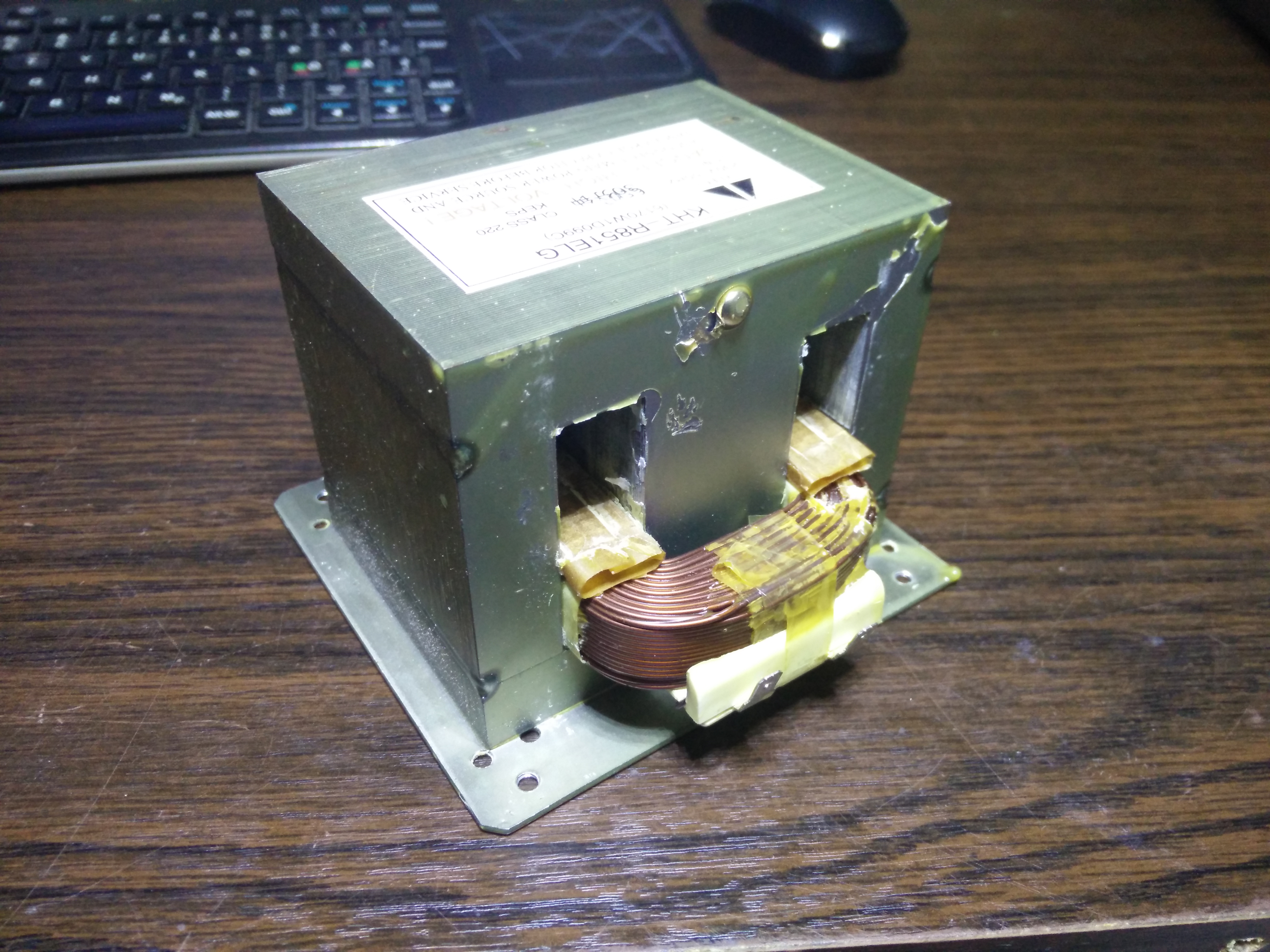
Yleisin tapa tehdä pistehitsauskone tee-se-itse -hengessä, on rakentaa se mikroaaltouunin muuntajasta ja hitsauskaapeleista. Näin tein kutakuinkin minäkin.
Toisiokäämi poistettu.
Mikroaaltouunin muuntaja sopii asiaan hyvin koska ensiö- ja toisiokäämit ovat toisistaan erillään. Tähä voi käyttää siis mitä vaan muuntajaa, mutta mikroaaltouunin muuntaja on helpoin.
Mikroaaltouunin muuntajassa on verkkosähköinen ensiökäämi ja korkeajännitteinen toisiokäämi. Toisiokäämi pitää poistaa jotta sen tilalle saa laitettua paksua johtoa joka kestää virtaakin.
Paras tapa poistaa toisiokäämi on sahata se pois ja naputella puupalalla loput irti. Myös ”magneettishuntit” kannattaa ottaa pois, sillä ne rajoittavat virtaa.
”Magneettishuntti”
Ensin tein koneen yhden mikroaaltouunin muuntajasta, teholtaan noin 1150W, joka tuottaisi noin 670A 1,7V. Olin lukenut ”netistä” että tämä pitäisi riittää. No kyllä se riittääkin jos nappiparistoja tai muuta pientä hitsailee.
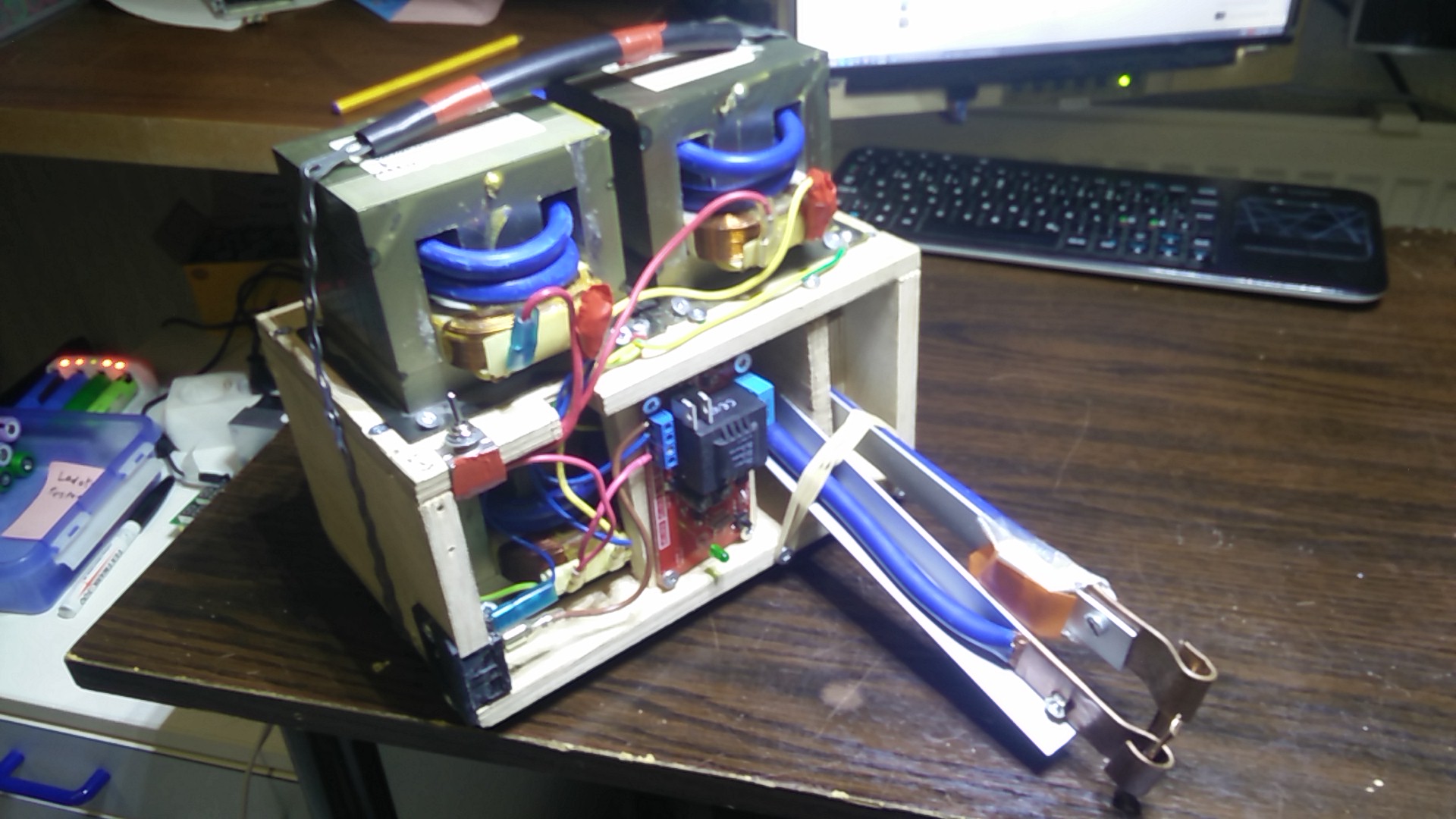
Ensimmäinen versio laitteesta. Yhdellä muuntajalla.Näyttää hitsaavan hyvin, mutta ei pidä.
Ensimmäisessä versiossa oli tosiaan vain yksi muuntaja, joka oli liian tehoton. En siinä vaiheessa tiennyt että se oli liian tehoton, vaan syytin huonoja liitoksia ja putkestä leikattuja elektrodeja.
Joten yritin etsiä tehokkaampaa mikroaaltouunia, tuloksetta, joten yhdistin kolme muuntajaa rinnan. Kytkin muuntajat niin että voi valita onko kaksi vai kolme käytössä. Myöhemmin haen on-off-on-kytkimen jolla saa valittua onko 1, 2 vai 3 muuntajaa käytössä. Akkukennojen hitsaamiseen 0,2mm nikkelinauhalla riittää kaksi muuntajaa.
Elektrodit
Surkea viritelmä. Liikaa liikkuvia osia.
Hitsauskuparipuikot elektrodeina – ei toimi.
Kunnon kuparitangot.
Elektrodit – eli johtavat kappaleet jotka eivät hitsaannu kiinni kappaleeseen, ovat tärkeä osa. Kokeilin ensin kupariputkesta leikattuja suiroja, jotka toimivat yllättävän hyvin, mutta eivät kestä paljoa mekaanista rasitusta.
Kokeilin fosforikuparitankoja jota käytetään jossain hitsauksessa väliaineena. Johtavuus oli huono. Kokeilin myös kaarihitsaustankoja, tehty hiilestä, mutta niiden johtavuus oli tässä käytössä käytännössä nolla.
Monestakaan paikasta ei oikestaan löydy pelkkää kuparitankoa, joten tilasin yllättäen eBayn kautta, ja halvalla. Romuttamolta olisi varmaan löytynyt, mutta en ole ehtinyt käymään. Käytän nyt 8mm kuparitankoa.
Hitsausaika ja kontrolleri
Kontrolleri.
Kontrolleri kiinnitettynä.
Ilman kontrolleria.
Pistehitsauksessa tärkeää on myös hitsausaika. Toki sitä voi myös käsivaralta tehdä, mutta haluan tasaisempaa jälkeä.
Sivulla kerrotaan että paras tapa tehdä pistehitsaus on pehmentää metalli noin 50ms pulssilla jonka jälkeen itse hitsaus tapahtuu.
Tein sivuilla näkyvästä piirikaaviosta oman levyni. Piirilevyn suunnittelin EAGLE-suunnitteluohjelmalla ja teetätin levyt http://dirtypcbs.com/ avulla.
Johdotus
Liitokset pitää olla jämeriä!
Ensin tein liitokset erilaisilla viritelmillä, ja totesin että menee liikaa virtaa hukkaan. Viimeisessä versiossa kaikki liitokset on paukutettu kupariputkesta.
Kaapelit löysin romuttamolta vitosella. Noin 30mm2 paksuista joka riittää hyvin yhteen muuntajaan ja noin 50mm jolla jatketaan elektrodeille.
Jokaiseen muuntajaan kieputin 1,5 kierrosta johtoa. Yksi kierros on aina noin yhden voltin verran.
Valmis!
Viimeistelty versio laitteesta. Ei johtosotkuja eikä tule tällejä.